摘 要:近年来在许多信号处理应用领域中,深度卷积神经网络引起了学术界和工业界很大的关注,其中 基于数据流图的深度学习网络Tensorflow框架得到了很多人的青睐。但在一些商业落地的研究和调查中发 现,部分机构涉及一些自开发的计算单元,而它不被大型网络框架所支持,又出于技术的保密性往往需要 自行修改工业界的深度学习框架,这就造成了以下情况, ①工业级大型代码框架极其复杂,各大库之间的 调用很深且一般没有注释,不容易读懂和修改,②对某一个单一应用来说,工业界绝大多数的代码都是有 冗余的,这就使得代码整体比较臃肿(厚),性能会受点影响。基于这种受限的情况下,本文提出了一种 基于信号处理数据流计算图模型的方法,在多个平台多核下实现车辆分类。该方法在整个使用过程中,展 现了灵活地设计实现优化转换能力,多平台的兼容可实施性,可在有限的资源内根据自己的算法需求,分 立式地量身定制。在硬件电路加速或芯片的设计中,数据流所得到的高输出率、低延时特点是各厂家在写 RTL硬件设计语言时着重提出的特点,其次基于数据流的软硬件设计易于算法代码之间的转换、实现、移 植、调试、分析、综合、集成、优化和验证。
关键词:深度学习;数据流;计算图;多核运算;车辆分类
0 引言
随着国家进入人工智能时代,深度学习在嵌入式 和计算机应用领域无处不在,例如汽车嵌入式系统和 物联网,从而激发了在资源受限的边缘端做深度卷积 神经网络的设计方法和研究。本文中以车辆分类作为 具体研究案例,设计一种基于信号处理的数据流计算 图的模型框架和实现优化方法,迭代式的实现,实验 及优化,并在不同的平台及有限的计算资源下实现针 对四种相近车辆的分类。本文以数据流计算图原理出 发,介绍不同数据流技术建模的原理和形式,后举一 个从零开始基于车辆分类的例子,从训练某个应用的网络,选取网络参数和神经元权重开始,进行Matlab 的仿真代码实现,并以此为参考代码进行基于数据 流计算图C代码实现,随后对整个计算图进行深度优 化,最后单核和多核在不同平台下的性能进行了一一 对比。数据流计算图的简洁,跨平台,可扩展的完全 自主的特性,可用于任何特定领域,特别适合量身定 制的的嵌入图像和视频信号的操作。
1 数据流模型 (Dataflow Modeling)
1.1 数据流模型原理
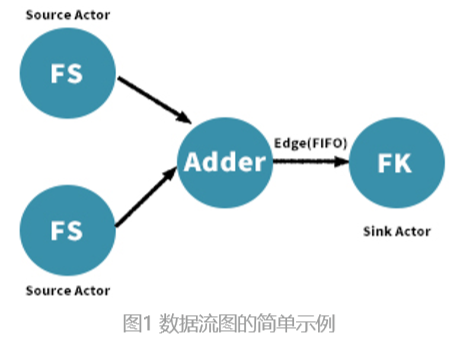
在数据流建模模型中,数据流图可表示为有向图,由一系列Actors(顶点)和edges(前进先出, FIFO)组成,其中actor表示任意复杂程度的计算单元 (可以是高节点的actor封装了一些计算图),edge表 示连接各actors的连线,从而构成一组计算图,代表 一个函数功能系统,数据类型则封装在token,在一 个actor通过 edge输出至另一个actor输入端。数据流边 缘可以表示e =(v1; v2),表示数据从v1到v2。这里 src(e)表示的v1称为源actor,sink(e)表示的v2称 为接收器。在一个数据流计算图中,一个actor在其接 受的数据足以计算该单元actor的算法时可以启动和调 用该actor通过其enable和invoke函数, 每个actor需要明 确定义其输入口消耗和输出口产生的 token的数量。 整个数据流计算图运行是一个离散的操作。在图1 中,Actor: FS1,FS2是2个源的参与者;Actor: Adder 是加法操作; Actor: FK是接收器。整个图表产生每个 actor触发(消耗)一个token到每个actor输出(输入) 端口上。
1.2 数据流模型概述
Core Functional Dataflow(CFDF)是一种可编程 的模型,常用于设计、分析及实现信号处理系统,尤 其是一种确定消耗产出比和有着动态数据流比例的 的信号处理单元的系统开发;Synchronous Dataflow (SDF)是最简单最流行的数据流模型,它有个限 制,即一个actor在每个传出边缘上产生的数据值是个 数字常量,同时actor从进入边缘消耗的数据值的数量 也需要是常量;Cyclo - Static Dataflow (CSDF) 是一 种类型的SDF,在一个 actor产生和消耗的token比是可变的,只要这个变值是一个固定的周期性的模式; Parameterized Dataflow (PDF) 是一种结合动态参数与 运行参数化的数据流计算图,尤其是那些有很明确的 图迭代概念的图形;Boolean Dataflow (BDF) 是SDF的 扩展,其中一个actor产生和消耗的吞吐率取决于控制 的二值函数token,它源自于动态数据流actor中的一个 指定控制端口;Enable - Invoke Dataflow (EIDF)是另 一种动态数据流建模技术。它将actors分成一系列模 式,每个模式都有一个固定的消耗和生成的token 的 数量,代表一个分支可以在运行时切换多种模式。
1.3 数据流模型环境: Lightweight Dataflow Environment – C (LIDE-C)
LIDE-C(轻量级数据流环境C)是一个灵活设 计的C语言的编程环境,允许设计人员挖掘基于数据 流的技术信号处理系统的设计实现和优化,专注于 基本的应用程序编程接口(API)功能。在整个框架 提供广泛的实现信号处理系统功能的组件,以及跨 平台操作,包括可编程门阵列(FPGA),图形处理 单元(GPU),可编程数字信号处理器(DSP)和服 务器工作站。LIDE-C软件包拥有许多数据流图元素 (actor和edge)实现库,基于这些基本要素可以自由 设计自己的数据流图并定义元素,开发特定的应用程 序(例如,控制,参数化和仪器相关的模块),和触 发整个数据流图的调度程序,详解可参考文章[1]。在 LIDE-C数据流计算图种actor和edge是关键2元素,其 中Actor设计包括四个接口函数:构造,启动,调用和 种植函数(图2)。
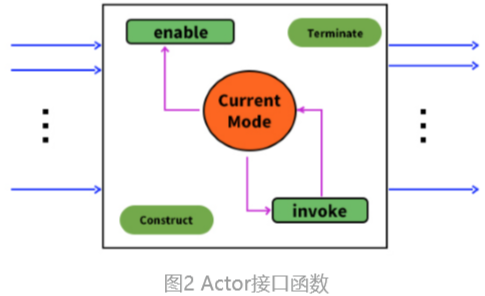
1)构造函数:创建actor的实例并连接端口,通过函数参数列表进行算法处理后传递给相连的一 组边。
2)启用功能:在运行时检查该actor是否有足够 的输入数据和空的缓冲区空间来支持下一次调用。
3)调用函数:为actor执行单次调用。
4)终止功能:关闭此actor在计算图的作用,包 括释放相关的存储对象及其所占用的资源。
LIDE-C中的FIFO设计构成的数据流图与其actors 本身相互独立实现和优化,开发者可专注于Actor的设 计(如算法的实现和优化),然后通过明确定义的接 口和fifos集成这些actors, 从而进行数据流图的调度 优化(并行,优先级), 这些可通过相互沟通实现整 个性能的表现。FIFO操作由C中的 接口函数封装。函数指针是指向这 些接口功能,以不同形式实现不同 的接口。LIDE-C中的标准FIFO有 以下执行操作:
创建具有特定容量的新FIFO。
从/向一个fifo读取和写入 token。
检查FIFO的容量。
检查FIFO中当前的token数。
使用FIFO完成后,用FIFO解除 存储。
在一个数据流计算图应用程序 中创建所有actors和fifos之后,逐步 连接并逐步触发检查图形下一个关 键actor,从而验证检查调试整个系 统的当前使用情况。
2 基于图像的车辆识别的网络架构
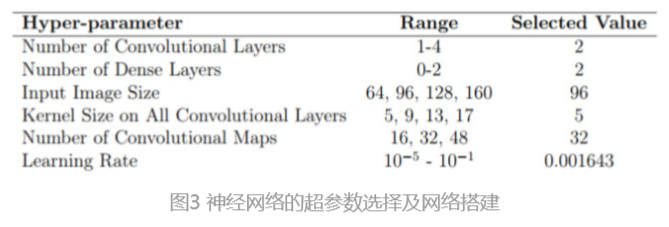
本文以基于图像的车辆识别网 络系统,从零开始一步一步得到相 应的网络,实现参考的Matlab推理网络代码,从而进 一步实现优化基于数据流计算图的C代码实现,此方 法具有一定的普适性和扩展性,且根据不同的需求可量身定制其它的应用需求。案例中的CNN实现四种 车辆之间的分类——公共汽车,卡车,面包车和汽 车,此源数据和工作基于之前的车辆分类工作[3],提 取了相关的有用信息,使用Caffe + Python 随机搜索 来最优的超参数。在使用50组随机生成的超参数(图 3)进行一系列搜索迭代之后,针对精确率和参数大 小及性能的特征平衡,推导出一套可实施的优化过的 超参数车辆分类系统, 等到训练模型稳定后,提取相 关的模型权重图4(注:本文目的是演示实现优化数 据流计算图的方法,所选取的类型为double型,读者 可根据深度学习相关知识,可相应地调整网络,例 如用全卷积网络或半精度数据类型或者8比特的整数类型)。
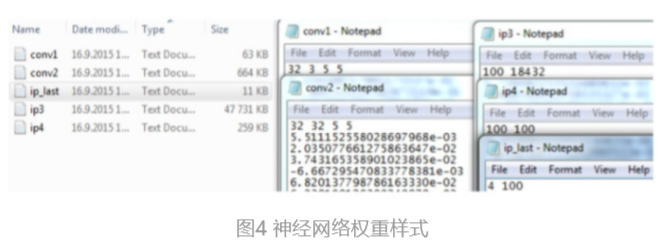
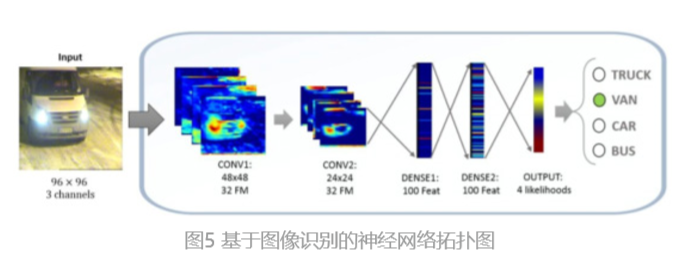
训练好后得到的超参数所形成的CNN架构(见图 4)由五层组成——两个卷积层,两个全连接层,最后是分类器层。第一层包括三个通道 (红绿蓝RGB通 道),每个输入图像96 x 96的三通道经过过滤后分解 成32个特征图,然后最大值池化为48×48。在第二层 中,有32组特征图再次卷积,然后下采样最大值池化 到24×24。第三层和第四层是两层全连接层,每个节 点有100个节点。分类器层执行从100个元素到4个元 素并通过softmax运算符得到4个等级可能概率值。在 层于层相邻之间,应用整流线性单元非线性激活函数 (ReLU)。
3 基于数据流的网络架构计算图设计
在得到整个网络拓扑图(图5)并提取出网络各 个神经元的权重(图4)后,先在Matlab环境中实现其 CNN 推理的图像分类代码,其主要目的其一是确保此 参数模型的最后效果,性能和准确性,其二是有一个 参考代码并可收集每一层运算后的数值,便于后续数 据流计算图C代码的实现、比较、调试和优化,这种 逐层式至最后庞大系统的检测有益于整体代码实现的 鲁棒性,并将可能的测试失败的原因显示化在具体的 某一层某个actor或fifo,进行更好更快速的实现代码设 计优化和迭代。
在开发了基于Matlab的CNN车辆分类系统的仿真 参考模型后(图6和图7),我们继续开发基于数据流计算图LIDE-C的设计以及实现,并在多平台多核上 进行性能测试,通过迭代式优化数据流计算图及actor 算法来提高整体性能。


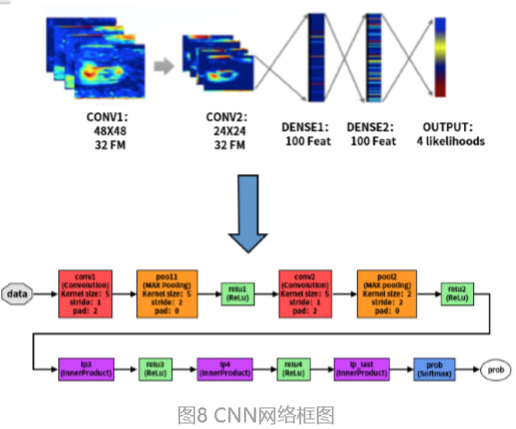
作为数据流模型的第一步,把CNN网络拓图转 换了网络框图(图8),每个框图都可以看成带参数 的高阶actor, 高阶actor可以封装一个或多个带参数 subgraph系统子图,而其中可能存在成千上万的actor 互连,其形式类似于硬件模块的实现,所以可以进行 很好的软硬件结合,此网络包含了共10种不同类型 的actor:读通道actor,写通道actor,卷积actor,池化actor, 非线性激活函数actor,分类器actor, 聚合actor, 广播actor,乘加 actor,矩阵乘 法actor。针对这些actors,按照不同的图结 构进行封装设计,形成三种不同的数据流 计算图(图9,图10,图11)。
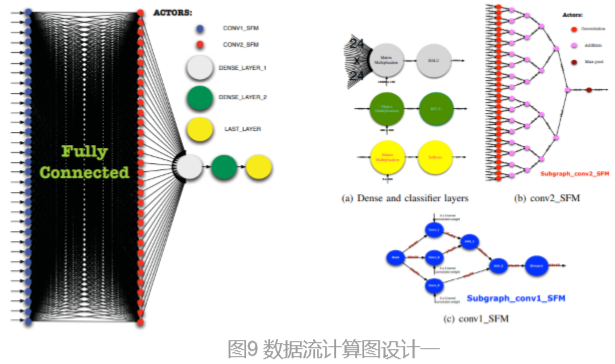

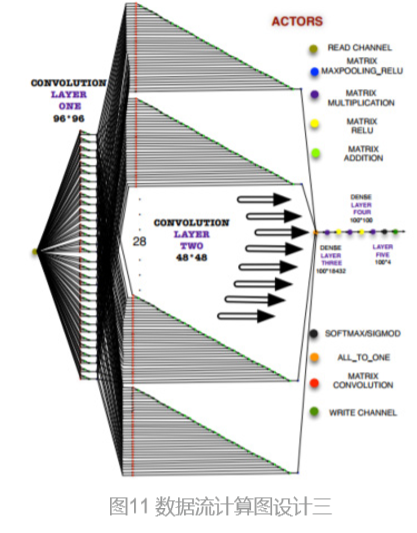
设计一的优点是整个架构与框图最接 近,且非常的清晰,易于理解和实现,验 证和检查整个数据流计算图很直接方便。 缺点是当子图已经确定且封装为一个大的 actor后,难以进一步深层次地优化,若子 图来自于第三方机构,当整个程序有错误 时,很难进行调试;设计二相对简洁,在 卷积层用到了循环展开(loop unrolling)和 流水线(pipeline)技术进行优化,增加延迟 但提高输出量。此方法很适合用于网络训 练图结构,但需要一些技巧,总体来说, 整个计算图仍旧可以理解;设计三的优点 是整个数据流计算图可以任意地在某一 步、某一个actor或fifo或缓冲区里跟踪,控 制,管理,验证,检测数据,除此之外, 设计三的颗粒度更细,可以更深层次进行 优化,自行控制的选择余地比较多,相 反的,缺点是不易于理解,构成,实现, 优化这颗粒度细且庞大复杂的数据流计 算图。
参考文献:
[1] SHEN C,PLISHKER W,WU H,et al.A lightweight dataflow approach for design and implementation of SDR systems[C]. Proceedings of the Wireless Innovation Conference and Product Exposition,Washington DC, USA, November, 2010:640–645.
[2] BHATTACHARYYA S S,PLISHKER W,SHEN C,et al.The DSPCAD integrative command line environment: Introduction to DICE version 1.1.Institute for Advanced Computer Studies, University of Maryland at College Park, Tech. Rep. UMIACSTR-2011-10, 2011.
[3] HUTTUNEN H,YANCHESHMEH F, CHENK.Car type recognition with deep neural networks[C].ArXiv e-prints, February 2016, submitted to IEEE Intelligent Vehicles Symposium 2016.
[4] BOUTELLIER J,LUNNIKIVI H.Design Flow for Portable Dataflow Programming of Heterogeneous Platforms[C].2018 Conference on Design and Architectures for Signal and Image Processing (DASIP):106-111.
[5] Representative Projects of the Maryland DSPCAD Research Group[EB/OL]. https://ece.umd.edu/DSPCAD/ projects/toplevel/projects.htm.
本文来源于科技期刊《电子产品世界》2020年第03期第22页,欢迎您写论文时引用,并注明出处。

